

授权公布号:CN113989498B
一种用于多类别垃圾场景识别的目标检测模型的训练方法
有效
申请
2021-12-27
申请公布
2022-01-28
授权
2022-07-12
预估到期
2041-12-27
| 申请号 | CN202111606977.4 |
| 申请日 | 2021-12-27 |
| 申请公布号 | CN113989498A |
| 申请公布日 | 2022-01-28 |
| 授权公布号 | CN113989498B |
| 授权公告日 | 2022-07-12 |
| 分类号 | G06V10/25;G06V10/774;G06V10/82;G06K9/62;G06N3/04 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 北京文安智能技术股份有限公司 |
| 申请人地址 | 北京市海淀区丰豪东路9号院2号楼5单元801 |
专利法律状态
2022-07-12
授权
状态信息
授权
2022-02-18
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06V10/25;申请日:20211227
2022-01-28
公布
状态信息
公布
摘要
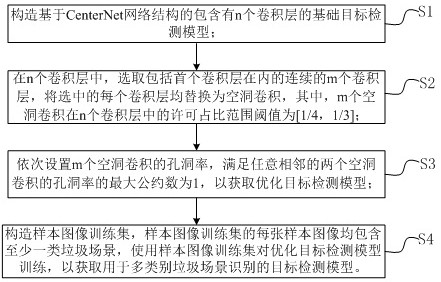
本发明提供了一种用于多类别垃圾场景识别的目标检测模型的训练方法,包括:构造基础目标检测模型;在p个卷积层中,选取连续的m个卷积层,将选中的每个卷积层均替换为空洞卷积;依次设置m个空洞卷积的孔洞率,满足任意相邻的两个空洞卷积的孔洞率的最大公约数为1,以获取优化目标检测模型;使用样本图像训练集对优化目标检测模型训练,以获取用于多类别垃圾场景识别的目标检测模型。本发明解决了现有技术中的目标检测模型因其感受野范围小,从而对具有广阔视野的场景图像存在垃圾目标检测精度低的问题,将此类场景图像作为模型输入进行垃圾识别检测,所得到的检测结果往往会出现多点位垃圾识别无效或垃圾检测误报的现象。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2025 品牌网 chinapp.com 版权所有